中图分类号: TN98?34 文献标识码: A 文章编号: 1004?373X(2019)05?0027?05
A new collection and monitoring system of flotage in water area
ZHU Dian, LIAO Min, LIU Xinshun, LIU Xiaodong, LIU Lei
(Beijing Institute of Computer Technology and Application, Beijing 100854, China)
Abstract: In order to improve the situations of ecological environment damage and water pollution caused by floating litter in water area, various forms of cleaning and salvage were carried out at home and abroad. A new water surface cleaning and monitoring system was developed for the low automation degree of salvage mode and delayed state monitoring. The system can collect the floating litter such as plastic garbage by means of collecting device, and transmit the collected data. The collection network database system is set up to provide the effective collected flow monitoring data for visual display in the form of map, and provide the monitoring and management services of floating litter. The system can reduce the physical labor of cleaning workers, and promote the control and management of garbage in water area, and solve the problem from the source of marine debris.
Keywords: floating litter; collector; water surface cleaning monitoring; ocean debris; salvage; plastic garbage
0 引 言
绿色和平组织在2016年8月发表报告指出全世界每秒钟有200 kg塑料被倒入海洋,累计每年有超过800万吨塑料留在海洋中。2017年虽然我国海水质量总体有所改善,但陆源入海污染压力较大,在旅游休閑娱乐区等邻近海域海洋垃圾密度较高[1?3]。海洋河流湖泊等水域内的漂浮垃圾正在逐渐威胁到自然生态环境以及人类和自然的和谐发展。
我国对城市水面漂浮垃圾的污染控制相当重视,2015年《水污染防治行动计划》中明确规定,要求河面无大面积漂浮物,河岸无垃圾,无违法排污口。目前漂浮物打捞收集方式为人工打捞,工具为小船和自制工具。打捞方式落后,人力资源有限,在2017年有16个断面水质严重恶化且不达标,导致政府重点任务进度滞后。
针对现有的打捞和收集方式自动化程度低的问题,国内外均开展了自动收集装置的研究,包含清洁机器人、船用收集装置[4?6]、洋流驱动设备。清洁机器人造价较高,船用清洁装置适用于船体,洋流驱动设备适用于海洋等大面积水体,在河流湖泊不利于大规模广泛推广。一般单台设备独立运行控制,无法进行系统性协调统一规划运行。废弃漂浮物如果不及时清理,在河流水域随水流运动,污染下游流域。针对漂浮物监测问题,国内外也对该项监测进行了研究。目前一般的监测为高清视频监测的方式,通过软件过滤、去除水波抖动、智能算法等提高精确度[7?8],算法依赖性强。设定漂浮物聚集地,从源头监测治理的方案一直得到广泛认可[9?10] ,但是实施打捞方式的自动化程度不高,监测不够全面,不利于漂浮物的管控。因此,开发和应用水面漂浮物收集监测系统,以自动化方式就地收集垃圾,减轻人工打捞的劳动量,进而实现实时流量状态监控,促进水域垃圾的控制和统一管理。
1 系统设计
1.1 总体设计方案
水面漂浮物收集监测系统由自动收集装置前端网络和监测管理服务系统组成,如图1所示。区别于视频监测面积漂移计算的方法,消除了对视频监测软件的依赖性,该系统通过对水面漂浮物的收集,直接监测漂浮物收集的体积和数量,对垃圾流量监控更加准确。
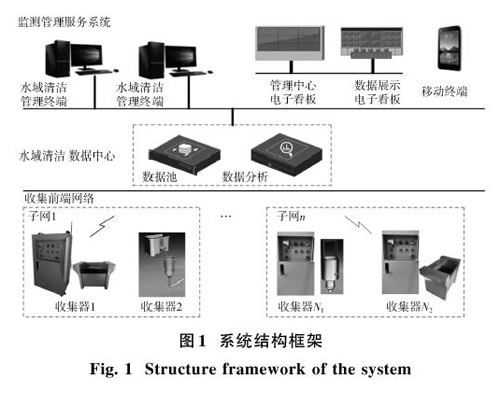
收集前端网络由处于各节点的不同种类收集器组成。收集器的自动收集前端装置放置于水中,完成水域漂浮垃圾收集,收集状态的监测;控制系统箱体放置在陆地,完成就地控制和无线传感的功能,将收集数据和状态传输至服务器,接收管理终端的控制,组网运行。
监测管理服务系统由数据采集和分析服务器、水域清洁管理系统终端和移动终端组成。监测管理系统对水域的漂浮垃圾收集数据进行记录、分析和处理,将数据传输给管理应用层,对自动收集装置组成的多机系统进行收集监测和运行控制。也可以通过移动终端实现装置的远程控制功能。
1.2 主要功能技术指标
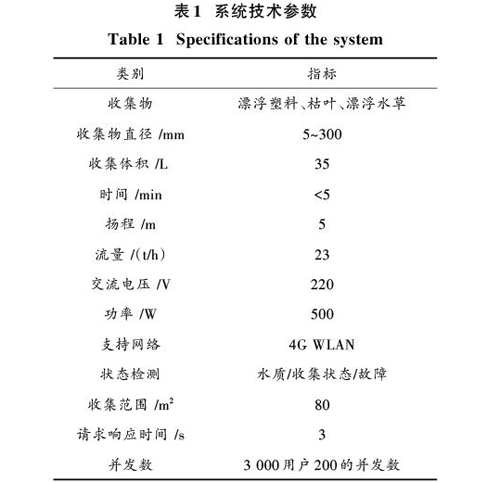
收集器系统采用电驱动方式,通过抽吸过滤的方式实现漂浮物收集,方便就地控制,前端内置传感器检测收集器的收集状态,通过无线传输对水面漂浮物进行监控、流量统计和状态评估。系统的主要技术参数如表1所示。
2 收集前端网络
收集器的设计依据水利和水势布局,满足不同水势变化的要求。漂浮物随着水利地势情况会形成一些天然聚集地,将收集器在漂浮物聚集地合理布置安装形成收集网络。
2.1 收集装置设计
河流湖泊水位随着朝夕、季节、天气不同而变化,高度变化可超过1 m,如果采用固定高度收集方式,则水域的水位变化时,收集器沉入或高于水面,不能实现正常收集功能。因此收集前端装置设计能够自适应水位,在垂直方向随水位浮动,在运行过程中竖直方向可根据水位自动调节。
设计收集装置自重不大于30 kg,单人能够搬动,左右端面方便抓握,满足人体工程学要求。收集装置前面板入口低于水面不小于40 mm,水面的大部分垃圾能被水流带入垃圾桶。
实现装置稳定漂浮运行,需满足几个条件:浮心在上,重心在下,稳心在重心之上,回复力矩为正值;水泵排水量小于入水口最大流量,防止抽水造成装置浮起;运行过程中竖直方向排水浮力和重力合成产生上浮力,上浮力零点位于水面下15 mm处,上浮时速度零点位于水面下20 mm。
根据以上原则,设计装置为左右对称的长方体结构,左右两侧为浮板提供浮力漂浮于水中,前面板低于水位为漂浮物的入口,如图2所示。装置满足近岸的浅水收集要求,高度为480 mm,容积为40 L。箱体由潜水泵1、漂浮箱体2、过滤内网6组成,底部安装配重铁块降低重心增加稳定性,内壁安装传感监测设备5。漂浮箱体侧板采用实心浮体结构,分为水下区域、浮动区域和储存浮力三部分。储备浮力部分处于水面上方,作为扰动时维持稳定漂浮的浮体。设计浮板水下区域厚50 mm,高度为280 mm,该部分体积提供浮力为133 N,水泵、配重、结构体为80 N,浮动区间浮力为76 N 。干舷部分储备浮力为112 N,提供摇摆倾斜时的稳定性。
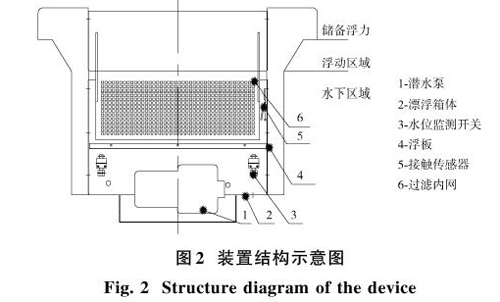
静态水泵不启动时水位线位于箱体储备浮力和浮动区域交界。入水口位于水面下,接通电源启动水泵工作,将箱体内水排出,水流和漂浮的垃圾通过入水口进入收集器,水流经内网过滤后通过水泵排出,垃圾留在过滤内网里完成垃圾的收集。
启动工作后,水泵向箱外抽水,水箱内水量减少,向上漂浮,入水口处水流入。入口具有可随水流倾斜的挡板,稳定工作状态下,入水口挡板受到水流冲击力,固定点在拉力、浮力以及重力的作用下满足平衡条件。箱体内外水位差约10 mm。運行时箱体空腔体积等于浮起部分侧壁的体积,入水口和出水口流量平衡。
潜水泵采用卧式泵,流量为30 t/h,55 mm口径管道直排,满足箱体内外水位差要求。同时水位压差造成的扬程损失很小,在出水口实测流速可达3 m/s,可为箱体向前漂移提供动力。
接触压力传感器5在箱体的前后左右侧壁安装,通常每个侧面一个,用于监测内网废弃物的收集量,内网收集满废弃物,对传感器5产生持续稳定的压力时,通过控制过滤扰动信号判断收集满桶状态。传感器采用面接触式压力传感,较大的接触面可提高准确性。
水位传感器3用于检测收集箱体内的水位,在箱体内的水位较低时发出开关信号,启动故障水位状态保护,用于防止水泵干抽。
为了提高收集效率,可借助绳索牵引收集装置,借助水泵向前的推动力使装置在一定范围内运行,扩大收集半径和面积,如图3所示。
2.2 收集器控制系统设计
控制系统装在控制箱内放置在岸边,为自动收集前端提供动力电源;控制箱内置牵引收集装置,提供动力将装置收回靠岸;完成水泵调速和保护控制功能;采集前端装置状态信息,进行收集状态信息判断,将数据传输给上游数据库,提供水质监测接口。
2.2.1 收集器控制系统硬件
控制箱在面板提供指示和控制操作,方便人员就地控制。具有报警、运行、急停等指示,具有启动、停止、牵引、复位、急停及防干抽控制;提供过流保护,监测收集器收集状态(满桶/空桶)、监测设备状态(运行/故障)、水泵功率。通过无线传输实现该信息与监测系统同步。
控制系统硬件主要由牵引电机、水泵调速器、主控制板、传感器模块、传输模块组成。控制计算功能由控制主板实现,主板由处理器模块、传输模块、I/O模块、A/D模块、D/A模块、电源模块组成。控制主板接口如图4所示。

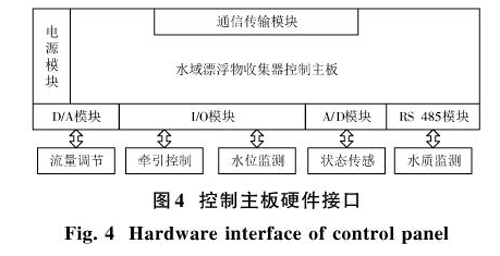
控制系统采用220 V AC供电,市电经开关电源给控制主板供电,满足电磁兼容要求。控制板以一定的周期采集传感器信息并依此判断垃圾桶内垃圾的收集状态。接口接入前端接触压力传感器,收到传输信号后,进行滤波处理,综合判断垃圾桶是否装满,防止错误传输垃圾桶垃圾收集状态。当垃圾桶装满时控制牵引绳索收缩从而将装置回收靠岸,方便垃圾清洁工清理收集框内的垃圾。通信传输模块将垃圾桶状态信息上传。
2.2.2 收集器控制系统软件
控制系统软件在硬件平台上完成前端自动收集装置监测控制以及数据信息上传的功能。
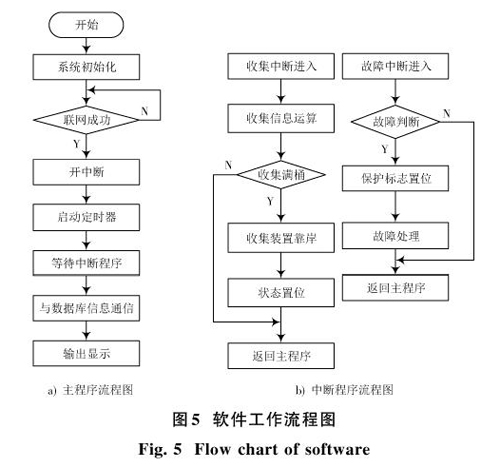
由多个收集器形成的网络在某个区域布置,形成统一的监测系统,收集装置开机首先加入网络,进入工作状态。为了降低系统功耗,软件采取“发送?休眠?发送”的工作方式,终端控制器以一定的周期采集现场状态信息,以中断的方式将采集的数据进行处理,提取监测对象状态的特征信息,判断垃圾桶是否装满以及工作是否正常。当收集装置装满时,及时发出绳索牵引的命令,将前端收集装置靠岸,同时水泵停止工作,起到节能作用。工作流程图如图5所示。
控制系统监测传输的数据内容包括地理位置、设备编号、设备型号、工作状态、垃圾收集状态、当前动力功率、当前报警信息、牵引电机功率、牵引电机状态。当判断任一状态发生变化时,将数据传输发送,连续发送多次应答数据帧,确保数据传输成功。数据通过有线、无线或4G方式传送至数据采集服务器,完成状态感知和信息传输的功能。
3 监测服务系统
监测服务系统服务于清洁人员、水域管理人员以及公众群体。在控制中心的电子看板上向管理者展示设备信息,当前和历史的水面清洁态势,对布置在水域的设备进行控制和管理;基于前端收集网络的实时数据,在管理Web端向清洁人员就近发布作业指令,进行设备巡查和清理,提高清洁效率,辅助整体水域管理和治理措施决策。
3.1 服务系统构架
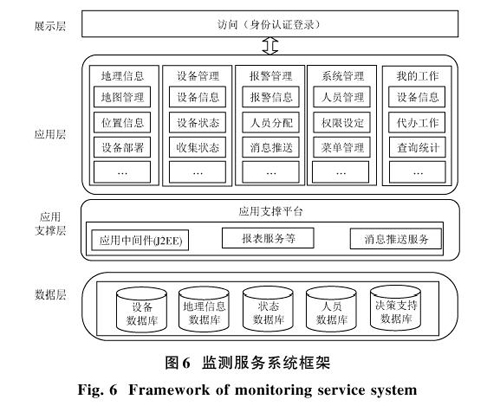
系统采用B/S模式设计开发。通过用户名密码方式实现用户的身份认证,为不同身份用户提供不同的信息及应用系统的访问控制。
前端收集网络传感信息数据存储在数据层,设置设备数据库、地理信息数据库、状态数据库、人員数据库以及决策支持数据库。通过数据处理运算,在应用层为用户提供地理信息显示、设备管理控制、系统管理服务以及人员工作等服务。
服务平台实现3 000用户200的并发数,数据互操作依托于互联网,通过硬件系统确保网络通信的顺畅。采取通用的网络传输协议,应用开源系统平台,实现系统智能性、实时性,促进平台上数据的互操作顺利进行。采用多层次信息安全系统,根据信息种类制定不同的信息安全计划,对某些信息进行特殊安全保护,保证信息系统安全。
监测服务系统框架如图6所示。
3.2 Web端和移动端系统设计
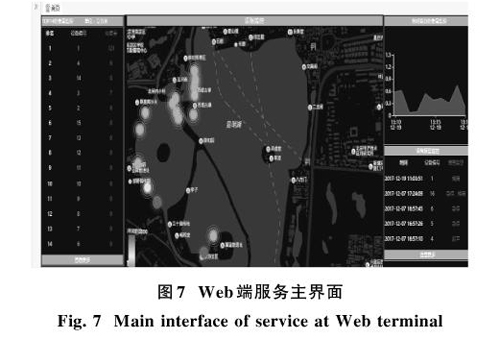
Web监测服务系统以实时地图的方式进行界面展示,实现简单易用的快捷操作,如图7所示。地图上以点位的方式显示布置状况,可进行放大缩小和点位控制操作。各点位不同的颜色表示收集状态和故障情况。点击收集器的点位进入设备管理界面,显示该设备的地理位置信息、收集的状态以及设备的责任人员;在该界面可对设备进行远程控制操作,选择责任人分配任务,就近对装置进行巡查和清理。
通过前端设备传输的收集数据,得到分区域分时段的漂浮物监测情况。对单台设备的清理次数进行统计,在界面对收集器清理情况排序显示,得到不同区域漂浮物流量的监测数据;对各时段的收集总量进行统计,得到该区域不同时段的漂浮物流量监测数据。可采用不同的颜色对不同流量的区域进行分块显示,方便管理者对某个水域的漂浮物流量总体状况评估以及监管控制。
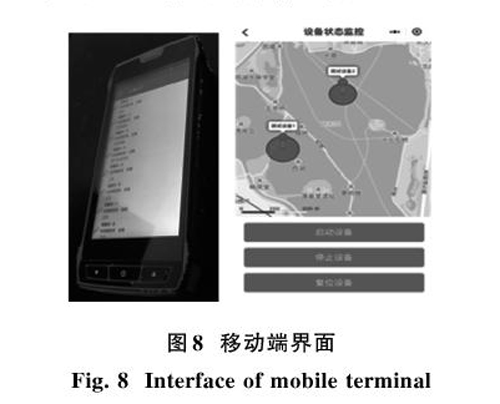
移动端界面如图8所示。移动设备可采用专用手持设备和手机移动端,专用设备可实现高安全等级防护。与Web端界面同步,手机移动端采用地图显示,可使用微信接口接入,不需要下载安装即可使用,用户扫一扫或搜一下就可打开应用,巡视人员可随时随地查看设备状态,远程对设备进行操作和管理。
4 结 论
针对目前河流湖泊人工打捞的方式,基于智慧物联网技术研制了漂浮型电驱动水面漂浮物收集监测系统。通过传感器可获得水域漂浮垃圾收集状态数据以及设备运行信息。应用数据库对状态数据、作业信息数据、控制指令数据等进行存储解析和传输,同时接收PC端或者手机端的控制指令数据,随时随地对前端设备进行控制管理。
监测管理系统在流域的广泛使用可逐步形成系统性服务平台,该系统服务于水域园林用户、行政管理部门、社会用户及民众,可兼容各种接入设备。依据大量的水面收集信息定期向社会发布漂浮物的流量状态信息监控情况,给使用者提供水资源状态预估和决策建议,为发挥社会层次价值提供公益性服务,提升环保产业运行效率,打造美好的人与自然和谐共存的生态环境。
参考文献
[1] 应子翔,程都,杨佳瑶,等.水上漂浮式垃圾回收方法综述[C]//第十八届中国海洋(岸)工程学术讨论会论文集. 舟山:中国海洋(岸)工程学会,2017:752?756.
YING Zixiang, CHENG Du, YANG Jiayao, et al. Overview of floating garbage recovery methods on water [C]// The 18th China Ocean (Coastal) Engineering Symposium. Zhoushan: China Ocean (Coastal) Engineering Committee, 2017: 752?756.
[2] 国家海洋局.2015 年中国海洋环境状况公报[R].北京:国家海洋局,2015.
State Oceanic Administration, People′s Republic of China. China Marine Environment Bulletin 2015 [R]. Beijing: State Oceanic Administration, People′s Republic of China, 2015.
[3] 孙承君,蒋凤华,李景喜,等.海洋中微塑料的来源分布及生态环境影响研究进展[J].海洋科学进展,2016,34(4):450?455.
SUN Chengjun, JIANG Fenghua, LI Jingxi, et al. Research progress in distribution source and ecological environmental impact of marine micro plastics [J]. Advances in marine science, 2016, 34(4): 450?455.
[4] 张丽珍,杨佺,吕超,等.小型水域水面漂浮物交替筐式收集装置的设计[J].机械设计与研究,2016,32(6),118?123.
ZHANG Lizhen, YANG Quan, L? Chao, et al. Design of floater collector with alternate baskets in small waters [J]. Machine design and research, 2016, 32(6): 118?123.
[5] 曾义聪,刘建发,谢秋敏,等.水面漂浮垃圾清理机的设计研究[J].徐州工程学院学报,2013,28(1):69?73.
ZENG Yicong, LIU Jianfa, XIE Qiumin, et al. Design and research of surface floating garbage cleaner [J]. Journal of Xuzhou Institute of Engineering, 2013, 28(1): 69?73.
[6] 卞怀强.基于并联机构的可变形水陆两栖清理船设计与研究[D].上海:上海工程技术大学,2015.
BIAN Huaiqiang. Design and research of deformable amphibious cleanup based on parallel mechanism [D]. Shanghai: Shanghai University of Engineering Science, 2015.
[7] YU Wang. Aquatic environment monitoring using robotic sensor networks [D]. USA: Michigan State University, 2015.
[8] 徐静波.水面漂浮物监测及估算系统开发与建设[J].江苏水利,2018(8):51?57.
XU Jingbo. Development and construction of monitoring and estimating system for floating objects on water surface [J]. Jiangsu water resources, 2018(8): 51?57.
[9] 杨文俊,冯正鹏,唐祥甫,等.三峡水库漂污物治理研究与实践效果[J].水利发电学报,2009,28(6):83?87.
YANG Wenjun, FENG Zhengpeng, TANG Xiangfu, et al. Floating debris management research and practice effect of three gorges project [J]. Journal of hydropower, 2009, 28(6): 83?87.
[10] 蔡莹,李章浩,李利,等.河道型水库漂浮物综合治理措施探究[J].长江科学院院报,2010,27(12):31?35.
CAI Ying, LI Zhanghao, LI Li, et al. Exploration of flotage comprehensive management measures of channel reservoir [J]. Journal of Yangtze River Scientific Research Institute, 2010, 27(12): 31?35.